Lesson 3. Create Problem Programmatically

Contents
This lesson shows how to create and solve optimization problem using PSG m-functions. All MATLAB operations are in the file: ./Aorda/PSG/MATLAB/Examples/Toolbox/Example_CVaR_Toolbox.m
Step 1. Pack data to PSG format
Define input data in MATLAB Command Window:
H=[1,4,8,3; 7,5,4,6; 2,8,1,0; 0,3,4,9];
c=[0.2; 0.11; 0.6; 0.1];
Aeq=[1, 1, 1, 1];
lb=[0; 0; 0; 0];
vars={'x1', 'x2', 'x3', 'x4'};
Pack input data to PSG structure containing headers and data (see Main Objects of PSG MATLAB):
Create PSG matrix 'matrix_scenarios' (see tbpsg_matrix_pack):
toolboxstruc_arr(1) = tbpsg_matrix_pack('matrix_scenarios',H,vars,c);
Create PSG matrix 'matrix_budget' (see tbpsg_matrix_pack):
toolboxstruc_arr(2) = tbpsg_matrix_pack('matrix_budget',Aeq,vars);
Create PSG point 'point_lowerbounds' (see tbpsg_point_pack):
toolboxstruc_arr(3) = tbpsg_point_pack('point_lowerbounds',lb,vars);
Step 2. Prepare Problem Statement in General (text) Format
Problem statement syntax is described in Problem Statement in MATLAB.
Create the following variable in MATLAB:
problem_statement = sprintf('%s\n',...
'minimize',...
' cvar_risk(0.95, matrix_scenarios)',...
'Constraint: >= 4.5',...
' avg_g(matrix_scenarios)',...
'Constraint: == 1',...
' linear(matrix_budget)',...
'Box: >= point_lowerbounds');
Step 3. Solve optimization problem
Solve optimization problem programmatically (see tbpsg_run):
>> [solution_str,outargstruc_arr] = tbpsg_run(problem_statement, toolboxstruc_arr);
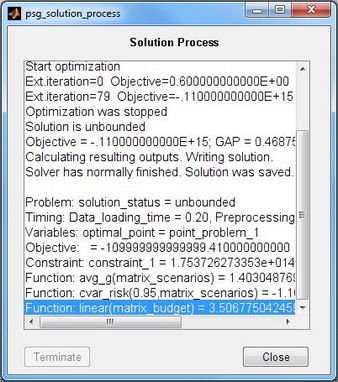
All results will be saved to the text report "solution_str" and structure "outargstruc_arr" (see PSG Solution in MATLAB).
Step 4. Extract solution details
Convert PSG Solution to structure using tbpsg_solution_struct:
output_structure = tbpsg_solution_struct(solution_str, outargstruc_arr);
>> output_structure
output_structure =
status: {'optimal'}
objective: -4.350000000000000
constraint_name: {2x1 cell}
constraint_value: [2x1 double]
function_name: {3x1 cell}
function_value: [3x1 double]
time: [0 0.180000000000000 0]
point_data: [0 0.599999999999997 0.190000000000002 0.210000000000001]
point_vars: {'x1' 'x2' 'x3' 'x4'}
matrix_data: {}
matrix_vars: {}
vector_data: {}
Save values of function to the new variable using:
>> output = tbpsg_function_data(solution_str, outargstruc_arr)
output =
4.5000
-4.3500
1.0000
Full list of available PSG m-functions for extracting solution details: Extract Solution Results Functions.
Step 5. Edit problem in Toolbox
Open current problem in Toolbox Window (see tbpsg_toolbox):
>> tbpsg_toolbox(problem_statement, toolboxstruc_arr);
The following screen will be opened:
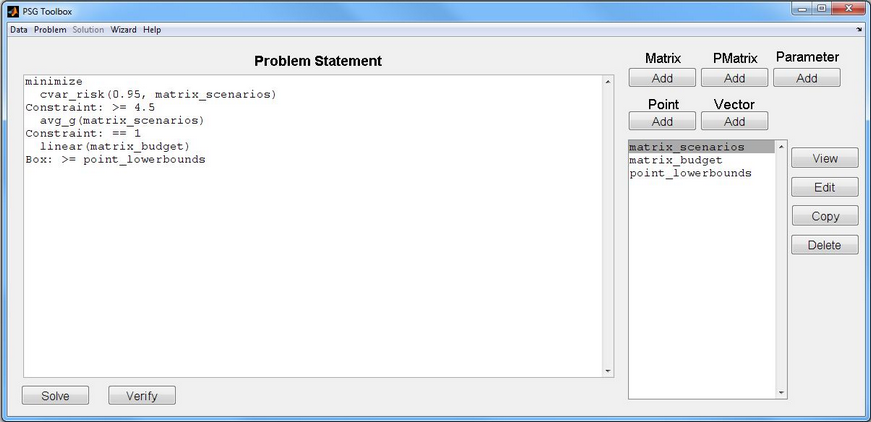
You can edit this problem using Toolbox Window (change problem statement and input data). For example, delete the second constraint:
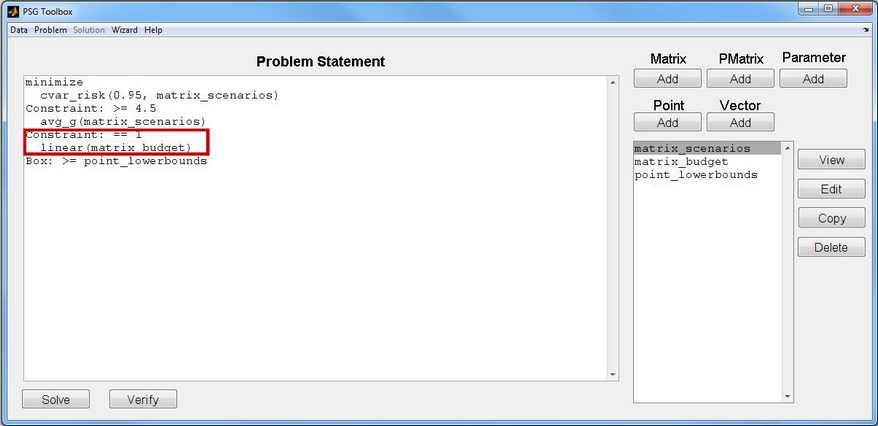
Press button "Solve" to start solving the optimization problem.